如果特斯拉FSD进入中国,车路协同还会继续吗?
车路协同服务边界,远在自动驾驶之外
自从特斯拉总裁马斯克4月份对中国进行闪电式访问以来,关于特斯拉自动驾驶(FSD)进入中国的传言就不绝于耳,更有所谓专业人士,从技术上进行长篇大论,论证特斯拉的自动驾驶不可能很快在中国落地。
这个观点笔者不敢苟同,其实特斯拉自动驾驶进入中国,就是最后临门一脚的事情,只要中国政府同意,马上就可以落地。
因此,有人又提出了一个问题,如果特斯拉FSD进入中国,车路协同还会继续吗?
我们知道,特斯拉的自动驾驶是纯视频、纯单车智能,没有依赖正在开展的基于C-V2X的车路协同技术路线,既然单车智能自动驾驶能商业化落地了,这个C-V2X车路协同还有必要继续下去吗?
更大的疑问则是,基于5G+C-V2X车联网技术的车路云一体化中国方案还能继续下去吗?
问题貌似尖锐和具有挑战性,其实在笔者看来,这完全是一些人长期以来对车路协同、车路云一体化认识的一个误区!
他们认为单车智能自动驾驶存在长尾问题,只有坚持车路协同技术路线,自动驾驶才能落地,误以为离开了车路协同这个“张屠户”,单车智能自动驾驶就只能吃“带毛的猪”,现在既然单车智能自动驾驶落地了,那么车路协同自然没必要继续下去了,其实这是对车路协同与自动驾驶关系认识的一个更大的误区!
车路协同服务边界,远在自动驾驶之外
车路协同并不是新的概念,即使是在马车时代也需要车路协同,马车夫观察路况,通过不同的吆喝口令驾驭马匹进退停转。
在汽车时代,随着新一代信息通信技术与车、路日益融合,车路协同的外延概念是指通过5G+C-V2X车联网等先进信息通信技术,在全方位动态实时交通信息采集与融合的基础上实现V2V、V2I、V2P、V2N的实时信息交互,开展主动安全控制和道路协同管理,充分实现车路云的有效协同,保证交通安全,提高通行效率,从而形成安全、高效和环保的道路交通系统。
从车路协同到车路云一体化的演进,笔者根据个人的理解,梳理如下表:

备注:1、T-Box:Telematics Box用于支持车云(V2N)远程信息服务通信,通常指4G/5G蜂窝网络终端。
2、V-Box:C-V2X单独形成一个BOX用于支撑V2V、V2I、V2P等近端通信车联网功能的实现。
3、T-Box +V-Box:集成5G+C-V2X功能于一体的车载车联网终端。
从上表,可以看出,C-V2X车路协同并不是专门为自动驾驶汽车服务的。
清华大学姚丹亚教授3月份在2024年中国商用车车联网大会上强调,十几年前提出基于车路、车车通信的车路协同理念,就是为了提升交通安全,减少交通事故。
据统计,90%的道路交通安全事故都是人为造成的,包括驾驶员的疲劳驾驶、玩手机等分心驾驶、逆向超车、闯红灯违规、超速驾驶等,另外,存在驾驶盲区,尤其是在多方向、多主体(行人、非机动车、机动车)参与的复杂道路交叉口,即使有信号灯信控系统,也不能完全分离交通冲突,如果驾驶员在通过交叉口时没有谨慎的注意,也会引发交通事故,造成人员伤亡,尤其是对行人等弱势交通群体的伤害;如果遇到不遵守交通规则行人、骑行人员不按照交通标志标线和信号通行,则会加大道路交叉口发生交通事故的概率。
因此,采用C-V2X车路协同技术,通过V2V、V2P可以对潜在的车辆碰撞、弱势交通群体的伤害进行告警提醒、V2I可以通过上帝视角提供超视距感知,消除盲区,对驾驶员进行安全提醒,从而降低道路交通事故概率,实现道路交通伤亡零愿景。
我们再看看洋洋万言的《美国V2X部署计划》,开篇即为“V2X技术,即车辆相互通信和与路边基础设施通信的能力,为防止碰撞、拯救生命以及提高我们交通网络的效率和可持续性提供了机会。”“现在是整个运输行业——原始设备制造商(OEM)、基础设施所有者和运营商(IOO)、联邦机构、供应商——团结起来,在基础设施和生产车辆中大规模部署这种拯救生命技术的时候了。”“2022年8月,交通运输部召开了V2X峰会,热情的参与者呼吁在全国范围内部署V2X系统,以提高安全性。”“V2X的承诺始终是关于安全的。随着美国高速公路上每年的死亡人数超过43000人,必须部署这项技术来遏制这场危机。V2X被称为每辆车都需要的数字安全带。”
“FCC指定使用的当前一代V2X技术Cellular V2X(C-V2X或LTE-V2X)已被许多机构根据实验许可证成功部署。交通运输部在V2X峰会上总结的C-V2X设备的初步实验室和现场测试表明,这些设备满足最低操作要求,可以在预期距离内有效广播,并且在具有预期和现实拥塞水平的环境中具有可接受的性能。”“本计划假设使用C-V2X低延迟无线通信系统,该系统在5.9 GHz频带运行,主要用于安全应用。FCC已决定在5.9GHz频段提供30MHz的频谱,并指定C-V2X作为该频谱中使用的技术平台。”这也就是我们国内同行所认为的,美国是支持C-V2X车路协同路线的。
但在这个部署计划里,关于C-V2X车路协同技术路线对自动驾驶的支持,简直是惜墨如金,仅仅在最后的“未来行动”中,描述到“确定至少40 MHz的额外频谱,以适应5G NR-V2X技术和自动化车辆应用的部署,包括合作感知,这将使自动驾驶车辆更好地了解周围的交通状况。”显然,当前(不早于8-10年内)美国V2X部署计划中并没有考虑对自动驾驶的支持。
无车路协同不自动驾驶?
数年前,笔者也认为因为存在“长尾”问题,单车智能的自动驾驶很难落地,自动驾驶必须要坚持车路协同的技术路线。
但现实的发展已经颠覆了笔者的观点。
一是人工智能的技术发展之快超乎我们的预料,如今已经进入生成式人工智能大模型时代,基于BEV+Transformer以及占用网络的自动驾驶技术架构模式,推动了单车智能自动驾驶的迅速落地。
最新的消息是,百度将在武汉投入1000辆第六代萝卜快跑自动驾驶RoboTaxi进行商业化运营,并预告了RoboTaxi盈利预期;5月14日,济宁市为九识智能颁发了500张无人城配车牌照,据了解,该公司的车辆为L4级自动驾驶货运车辆,已经为多家快递公司执行仓储至配送驿站的货物运输任务。
显然,单车智能自动驾驶的商业化落地已经是势不可挡,特斯拉FSD急切进入中国的心情也就不难理解了。
二是自动驾驶比人类驾驶更安全,可以有效降低道路交通安全事故。
前面提到90%的道路交通安全事故是由驾驶人员的不安全驾驶行为引发的,自动驾驶车辆不会疲劳驾驶和分心驾驶,不会闯红灯,不会违反交通规则,在交通冲突场景下,自动驾驶汽车会采取谨慎保守的决策执行策略。
赢彻科技高速公路干线物流自动驾驶运营里程已经超过了9000万公里,创造了0交通事故的奇迹,因此,单车智能自动驾驶比人类驾驶更安全可靠。
三是道路交通基础设施条件限制了车路协同路侧设施的部署范围。
显然只有高速公路和城市道路适合部署RSU、感知设备、边缘计算单元等车路协同路侧设施, 17万公里的高速公路在全国540万公路里程中所占比例极小,现有的普通公路、农村公路大多都不具备支撑部署智能化路侧设施的条件。
车路协同自动驾驶路线显然会大大限制自动驾驶汽车的运行范围,除非采取人机轮驾的自动驾驶汽车设计制造模式,这终究不是最终的长久之计。
我国汽车产业电动化、智能化、网联化和共享化的“新四化”战略部署,网联化在笔者看来就是C-V2X车路协同或者5G+C-V2X车联网车路云一体化,自动驾驶汽车已具备电动化、智能化和共享化(RoboTaxi),自动驾驶汽车的网联化当然有V2V、V2I协同安全需求,更重要的场景是自动驾驶汽车编队协同运行(V2V)和车云协同(V2N)的运行效率。
所以,业界也不再将单车智能和车路协同看作是自动驾驶汽车的两条不同技术路线,现在强调的是融合发展,实际上是通过车路协同或者车路云一体化赋能单车智能自动驾驶,也就说车路云一体化是自动驾驶的增强条件,并不是必要条件。可以用下图进行表示:

车路协同道阻且艰
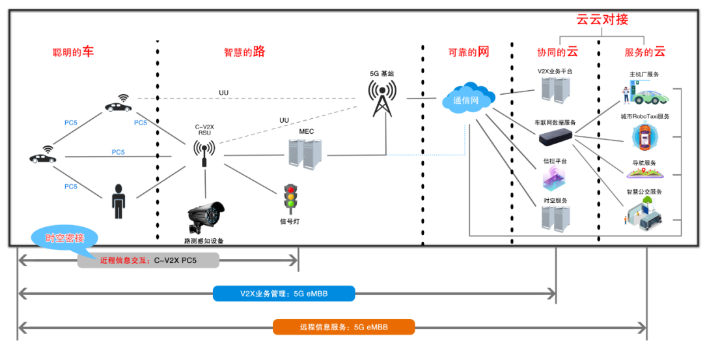
车路协同技术能够有效降低道路交通事故、挽救生命,符合以人为本、生命至上的发展理念,我国立足未来交通发展、塑造竞争新优势,提出了基于5G+C-V2X车联网的车路云一体化未来交通构想,并具有比较清晰的架构示意,如下图所示(云云对接示意由笔者原创)。
在车路云一体化推进过程中,面临的困难是显而易见的,就是通常所说的“两率一感”过低的问题,China SAE一期定义的17种车联网车路协同典型应用场景,目前能见到只有公交车红绿灯感知(绿波车速引导),其他场景难见落地。
笔者在某车联网先导区、苏州智能交通世界大会体验区均体验过主机厂的安全警示车路协同场景,其中一家国际大厂采用自己的通信协议,另一家采用C-V2X近端通信,但效果均差强人意,盆景式宣传大于实际应用意义。
显然车路协同很多场景还处于实验验证阶段,急于推动大规模OBU上车、RSU部署,不一定会带来立竿见影的效果。
车路协同能够为所有智能网联汽车,而不仅仅是自动驾驶汽车,带来安全增强,车路云一体化还可以有效提升交通效率。
将车路协同服务能力仅限于自动驾驶汽车的安全,显然格局太小,迫切需要车路协同增强交通安全的恰恰是非自动驾驶汽车,从今后很长一段时间来看,在我国4.5亿辆的机动车中,自动驾驶汽车(L3及以上)所占比例会是非常低的,绝大多数还是人工驾驶汽车(L2以下)。
笔者在某车联网示范区体验某自动驾驶接驳小巴,即使在示范区内路侧车路协同设施完备的条件下,该小巴仍然采用的是单车智能模式,即使在红绿灯路口,仍然靠自车识别信号,如此看来,C-V2X与单车智能融合的模式也不是一件容易的事,至少需要车、路在统一的时空体系、在统一的语义下才能开展。
在双智城市、车路云一体化建设中,笔者觉得襄阳车联网先导区在实施路径上是值得肯定的。即先从智慧的路建起,通过智能化、网联化、一体化实现城市一体化的智能信控平台,由路云协同打造的由“车看灯”到“灯看车”的城市智能交通管理模式,既提升了交通运行效率,缓解了群众出行难出行堵的问题,又实现城市交通状态的实时感知。
这些实时感知的信息可以由车联网数据服务平台通过云云协同的方式根据不同需求共享给智能公交管理平台、出租车管理平台、网约车平台、导航软件平台、城市物流配送平台甚至主机厂服务平台等智能出行服务运营商,这个信息共享过程充分体现了数据要素×的效果。运营商通过车云协同(V2N)的方式将信息推送至服务对象终端上,进行路线规划、事件提醒、拥堵避行、闯禁告警、导航建议等提醒和服务。
在智慧的路的基础上,推动车路协同建设,包括OBU上车和路侧RSU部署等,通过车路协同有效降低交通安全事故的发生。笔者愚见:即车路云一体化应坚持先路后车,先效率后安全这样的实施路径,要久久为功,方可成功。
今年年初,工业和信息化部、公安部等五部门发布了《关于开展智能网联汽车“车路云一体化”应用试点工作的通知》,在政策层面无疑是重量级的,笔者期望其是一剂助推剂,能扭转当前车路云一体化发展的困局。
未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明等材料,与我们联系,我们将及时沟通与处理。