车路协同的弹性停车系统
为交通系统的未来发展,缓解交通拥堵问题、安全问题等提供了新的载体

编者按:近日,在赛文交通网主办的第十二届(2023)中国智能交通市场年会,上海电科智能系统股份有限公司承办的“智见上海 遇见未来”分论坛中,同济大学交通运输工程学院赵聪博士发表了以《车路协同的弹性停车系统》为题的演讲。
该报告分析了目前交通系统的发展现状和未来交通系统的发展趋势,提出了弹性交通系统的概念与内涵,设计了基于车路协同的弹性交通信息物理系统架构,并介绍了该系统的关键技术与实施路径,最后以上海金鼎地下停车场为例进一步阐述了如何利用车路协同技术建设弹性停车系统。
一、车路协同的发展现状与趋势
1、研究背景
动态高强出行下交通系统时空均衡调控能力亟待增强。我国基础设施建设规模趋于稳定,但是在大型城市,如上海、北京、广州等地,其出行总量和强度不断增加,造成了严重的交通拥堵。
在汽车保有量不断增加和基础设施规模固定的情况下,交通需求呈现空间不均衡、时间不均衡和方向不均衡的趋势。停车难问题本质上就是停车的供给和需求在一定的时空范围内不匹配。
Nature Communications最新发表的文章表示,目前已通过调研发现,中国是交通基础设施中断预期风险损失最大的国家。如2017年上海中环重大交通事故,引发局部路段失效,导致“半个上海”路网拥堵。
交通系统在自然灾害和突发事件冲击下具有脆弱性,自恢复能力不足。因此交通系统的应对和恢复能力亟需提升加强。
2、国内外发展趋势
在两方面的是目前大的背景和需求下,从美国提出的《2030年的交通运输愿景》,到欧盟、日本等都对交通弹性的提升提出了明确的战略方向和规划具体的实践。中国也在最新的《交通强国建设纲要》和《国家综合立体交通网规划纲要》中都强调了提升交通系统弹性。
什么是弹性交通系统?相比于韧性,韧性是更侧重描述物理的交通基础设施,弹性是描述人、车、路、网、云全要素耦合的现代交通运输系统。所以提升弹性,成为国内外交通系统发展的共同战略方向。
3、现有提升弹性策略
目前道路交通的诱导系统,如百度导航等,都是提升系统弹性做路径规划的策略,但这是车动路不动的策略。停车难问题,是停车位不可移动,造成的停车难。我们的核心是通过智能网联交通系统的建设让路也动起来。实现未来交通系统的弹性,对车、路、网、云都提出了更高的要求,发展趋势可总结成车辆智能化、设施数字化、系统网联化三方面。
4、车路协同赋能弹性交通系统
同济大学交通运输工程学院提出了车路协同未来的演进方向(如图1所示),车和路从过去的主要是力学耦合,到现在的5G大数据信息互联,未来可动的、可变的道路和可协同驾驶的车融为一体。车路一体通过信息互联赋能的强耦合方向演进,为交通系统的未来发展,缓解交通拥堵问题、安全问题等提供了新的载体。
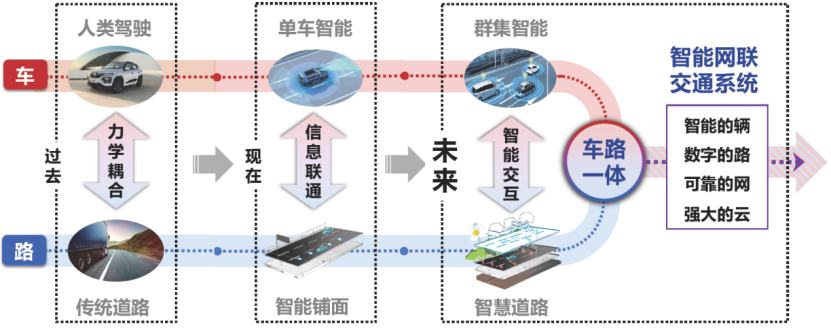
图 1 车路协同未来的演进方向
二、车路协同弹性交通系统
2021年,在国家重点研发计划“综合交通运输与智能交通”重点专项支持下,“弹性交通系统信息物理建模与评估理论方法研究”项目正式获批,该项目是在弹性交通研究领域首个获批立项的国家级重大研究项目,由同济大学牵头,联合了5家国内交通领域顶尖研发机构。
项目组初步给出了其定义和内涵,弹性交通系统(Resilient Transportation Systems)是具有状态可感知、能力可伸缩、网络可重构等特征的新型交通系统,为常态波动下可靠稳健、异常冲击下快速恢复的新一代交通基础设施规划设计、运行管理、更新再造树立了新标杆。
如图2所示,传统交通系统在车路协同的赋能下,转变为弹性交通系统。在突发异常事件后,能够更短的时间或者不需要外部的调控,就能够快速的恢复到原来的水平。以下详细分析了弹性交通系统具有的三个特征。
.png")
图 2车路协同赋能后交通系统的变化图
1、状态可感知
现实交通系统有不同的要素和特征,我们如何进行感知。下图是构建以“快-中-慢”三个层次变量为核心的弹性交通数字孪生底座模型(如图3)。
快变量是交通系统的人、车、物的移动轨迹等,这也是车路协同从路侧去感知所需要做的方面,具有变化迅速、随机性强的特点。
中变量是具有规律性的稳定变化趋势的交通系统设施,比如路面的性能、桥梁的性能和路面的平整度等。
慢变量是固有的属性,需要通过高精度的测量,具有变化有限、长期稳定的特点。通过这个模型,可实现全时空、全要素、多维度的交通系统数字化感知。
.png")
图 3 弹性交通系统数字底座模型
2、能力可伸缩
能力可伸缩,即通行能力的可变,通过智能车和数字设施两方面共同互相作用。首先是智能车,通过智能驾驶技术,将原来的车头时距从两秒做到一秒,甚至做到0.5秒的编队。其次就是数字设施,例如将所有的交通组织设施进行数字化,连接成网,实现能力可伸缩。通过智能车辆与数字设施协同控制,实现道路通行能力动态伸缩。
3、网络可重构
常态下,交通系统的交通需求会呈现固有的趋势和特征,根据每天的交通需求去预测未来要发生的OD,能够动态的去调整整个路网。非常态下,在异常事件的发生后,寻找更快的、更多样的交通组织方式,能让拥堵尽快的消散。如图4为网络重构的简单流程。通过网络重构,减少常态化交通拥堵,提升非常态自恢复能力。
.png")
图 4 网络重构流程
三、技术架构与实施路径
1、建立信息物理系统(CPS)架构
信息物理系统(Cyber-Physical System,CPS)是集成计算、通信与控制于一体的新一代智能系统通过信息空间(CyberSpace)和物理空间(Physical Space)各要素的映射和互操作,建立实时、动态、闭环的协同控制机制,如图5,为解决综合交通系统弹性提升难题提供了新的技术。

图 5 信息物理系统架构
2、全域泛在交通感知
根据上文提到的“快-中-慢”三个变量,提出不同的感知方式。快变量,必须要通过毫米波激光雷达以及智能驾驶车辆进行感知。中变量,针对基础设施的慢速损坏和标志标线的不清晰等,众包数据为基础设施的运行维护和管理提供数据支撑。慢变量,还是要用传统的测绘装备去实施。如图6,通过多维度、高精度、高可用感知数据,支撑构建交通系统数字底座。
.png")
图 6 感知“快-中-慢”三个变量数据,构建交通系统数字底座
3、网联可变物理设施
网联可变物理设施是一种未来的很重要的发展方向趋势,交通基础设施实现智能网联,可依据实时交通需求进行动态变化。通过感知交通环境,在边缘云与云控平台控制云端可变的交通设施实现相应的管理措施,如图7。这也体现出物理设施可移动、有智慧、够灵活,实现“路随车动”。
.png")
图 7 控制网联可变物理设施
4、增强现实数字设施
通过场景数字化技术实现交通数据在虚拟与现实空间中的映射与反馈。增强数字设施的核心不仅是数字孪生,而是把物理空间的东西更精准、更实时的描述到数字孪生里,在数字的空间中增加物理空间所没有的东西。
基于海量的数据和强大算力构建数字孪生模型,以虚促实,以虚强实。如图8为部分虚拟交通设施。
.png")
图 8 数字可变虚拟交通设施
5、智能决策高效计算
数字孪生不仅把现实东西用数字化刻画出来,还要实现对数字现实的超越,这需要智能决策的高效计算。通过虚实结合实现交通运行高效管理,迭代生成最优管理方案。高效计算不仅有云计算和大数据仿真推演,最核心的是交通智能体技术。
我们对每一个出行者,从O到D,从每天出行需求的产生到交通运行的状态,都有一个智能体的记录分析,对每个人的偏好,如出行时间、出行速度、出行路径等,都有完整的刻画,进而规划和推演接下来的行为。如图9所示,动态响应出行需求变化,实现交通资源智能分配与管理。
.png")
图 9 智能决策过程
6、分阶段实施路径
针对该系统可进行三个阶段的实施路径:第一,信息实时交互,解决安全和效率问题;第二,供需弹性适配,通过可变的交通设施能够实现动态供需的弹性适配;第三,车路一体控制。如图10。
.png")
图 10 车路协同的弹性交通系统分阶段实施路径
四、弹性停车系统的实践
弹性交通系统目标很宏大,实现过程比较艰难,所以我们选择停车场作为实践场所,因为停车场环境相对封闭、边界可控,又有明确的需求,我们在莫比乌斯环公园停车场打造了国内首个基于车路协同的弹性停车系统,在统一数字底座上,打通多个维度的数据和业务接口,实现停车设施网联可变,如图11。

图 11 弹性停车系统架构
以金桥停车场工程为例,我们进行了多方面的工作,通过全息感知与数字孪生重构了停车场全域精准轨迹级的运行态势;根据早晚高峰和平峰的停车交通需求,运用新兴可变标志标线和增强现实技术,进行停车场内交通组织策略的动态切换;同时,通过智能交互机器人平台设计了无人值守的群智协同安全管控系统,保障弹性交通在信号切换时的安全。
未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明等材料,与我们联系,我们将及时沟通与处理。