摘要:应用Vissim微观仿真软件对混合交通条件下五路环形交叉口信号控制进行研究,提出了环形交叉口信号控制配时设计的具体方法和过程,以及
摘要:应用Vissim微观仿真软件对混合交通条件下五路环形交叉口信号控制进行研究,提出了环形交叉口信号控制配时设计的具体方法和过程,以及各种交通信号配时参数的确定方法、标准及依据,并将其应用于浙江省富阳市一个极具代表性的5路环形交叉口;在现有无信号控制的基础上,仿真不同配时方案下的交叉口延误情况,分析结果表明该配时方案能有效减少人车延误,提高环形交叉口的通行能力,验证了Vissim微观仿真软件在环形交叉口信号配时的可行性。
关键词:环形交叉口;微观仿真;信号配时;延误;通行能力
0 前言
环形交叉口同一般平面交叉口相比,具有冲突点少、车流连续、行驶安全、便于管理等优点,因而在许多城市道路交叉口,特别是多路交叉时采用。然而,随着城市道路交通需求量的不断增加,原有许多环形交叉口的通行能力无法满足这种要求,交通问题日益尖锐。如何有效地利用交叉口的时空资源,最大限度提高交叉口通行能力,是从交通信号控制的角度研究解决环形交叉口问题的有效途径。
道路交通系统仿真的目的是运用计算机技术再现复杂的交通现象,并对这些现象进行解释、分析,找出问题的症结,最终对所研究的交通系统进行优化。在工程实践中,越来越多的人们将目光投向仿真技术,采用仿真技术并结合现有交通流和交通规划理论、方法来研究道路交通系统。本文采用仿真软件Vissim对某环形交叉口的交通流进行分析,模拟不同配时方案下交通流的运行情况,对运行效果进行评价,最终确定最优的信号控制方案。
1 Vissim仿真系统基本原理
VISSIM是由德国PTV公司开发的微观交通流仿真系统。该系统是一个离散的、随机的、以1/10秒为时间步长的微观仿真软件。车辆的纵向运动采用了德国Karlsruhe大学Wiedemann教授的“心理-生理跟驰模型”;横向运动(车道变换)采用了基本规则(Rule-based)的算法。模型视驾驶员-车辆单元(driver-vehicle-units)为一个统一体。它通过在交通网络上移动驾驶员-车辆单元来仿真交通流。经过交通网络的每一个驾驶员的驾驶行为依附于特定的车辆,依赖于该车辆的技术性能,驾驶员在多车道上不仅受前车的影响,而且还受相邻车道上行驶车辆的影响。其行为特性采用速度随机分布与车间距临界值的随机分布来表示。在模型中,驾驶员加速行为可视为速度、速度差、距离、驾驶员与车辆个体特性等因素综合作用的结果。一旦达到某一临界值时,驾驶员即从一种模式变换到另一种模式,该临界值是速度差和距离的综合表现[1]。
Wiedemann的跟驰模型是迄今用于计算机交通仿真的最为精确的模型之一。因此就这一点来说,基于这一理论基础而开发的微观交通仿真软件VISSIM应能较真实地反映和重现实际交通状况。Vissim提供了图形化的界面,用2D或3D动画向用户直观显示车辆运动。
2 交通仿真的参数设置
用Vissim仿真软件对环形交叉口的交通流进行仿真所需要的条件包括道路条件、交通条件和驾驶员行为参数等,其中道路条件包括车道数、车道宽度、车道长度、渠化情况、纵坡度和纵坡长等;交通条件包括交通组成、交通量、车辆基本性能等;驾驶员行为参数包括车道变换和等待时间参数、必要的车道或路径变换加减速度最大值及可接受值参数、横向特性参数和跟车行为参数等。
道路的车道数、车道宽度及其渠化情况等应根据实际情况调查获得。交通条件中的交通组成、交通量等要分时段、分车种调查获得。
驾驶员行为参数应该根据现实交通运行情况进行仿真标定,但根据实际经验和条件限制,车道变换和等待时间参数、必要的车道或路径变换加减速度最大值及可接受值参数、横向特性参数取软件推荐的平均值,而跟车行为参数bx_mult取3.5,bx_add取2.5比较合理[2]。具体参数设置详见表1。
表1 驾驶员行为参数表
跟车行为参数 | 必要车道变换 | |||||
平均停车间距(m) | 附加的安全距离(m) | 可增加的安全距离(m) | 最大减速度(m/s2) | 每百米减速度变化 | 可接受的减速度(m/s2) | 最小车头空距(m) |
2 | 2.5 | 3.5 | -4 | -1 | -1 | 0.5 |
3 Vissim仿真软件在5路环形交叉口交通运行分析中的应用
本文以浙江省富阳市“514”转盘为例,详细介绍Vissim在环形交叉口信号配时中的应用。富阳市“514”转盘是一个5路环形交叉口,其渠化情况见图1。

图1 富阳市“514”转盘
3.1 “514”转盘的交通现状
“514”转盘现状是一个5路交叉的、环形无信号控制交叉口,其中横凉亭路西接过境公路是富阳市的西门户,货车和进城车辆比较多;金桥北路与“514”车站相连,公交车、客运车比较多;孙权路和桂花西路通往富阳市区,交通量也比较大。整个交叉口,交通量较大,尤其是高峰期间交通运行混乱,车流不畅,严重影响了路网的交通运行,所以有必要采用信号控制来改善目前的交通状况。
在“514”转盘的交通调查中,将车辆分类为大型车、中型车及小型车,选取早高峰07:30~08:30为调查时段,“514”转盘各路口现有道路交通条件如表2。
表2 “514”转盘的道路交通条件
进口道名称 | 坡度(%) | 车型比例/% | 交通量 (辆/小时) | 当量交通量(pcu/h) | ||
大型车 | 中型车 | 小型车 | ||||
金桥北路 | 0 | 7 | 4.1 | 88.9 | 881 | 960 |
孙权路 | 0 | 3.1 | 7.4 | 89.5 | 920 | 982 |
桂花西路 | 0 | 2.3 | 5.3 | 92.4 | 743 | 779 |
金桥南路 | 0 | 1.4 | 4.5 | 94.1 | 590 | 611 |
横凉亭路 | 0 | 7.5 | 8.3 | 84.2 | 794 | 886 |
3.2 环形交叉口配时设计的基本步骤
第一步:信号相位设定
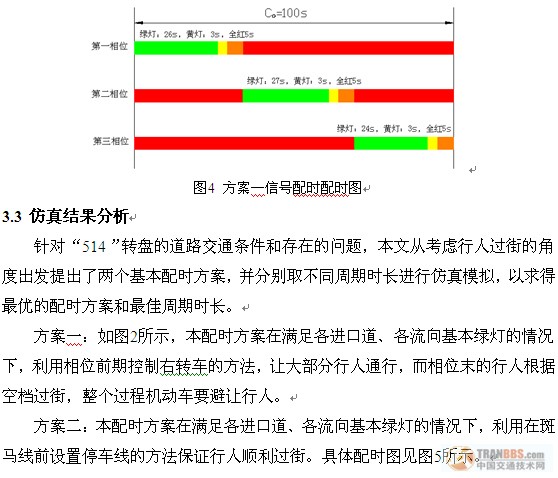
选取早高峰07:30~08:30为设计时段,根据交叉口平面布置方案,几何尺寸及车流运行情况,确定信号相位与信号阶段划分方案,如图2所列。表中数字代表进口道编号,箭头代表车流方向,双箭头代表行人,字母代表信号阶段。




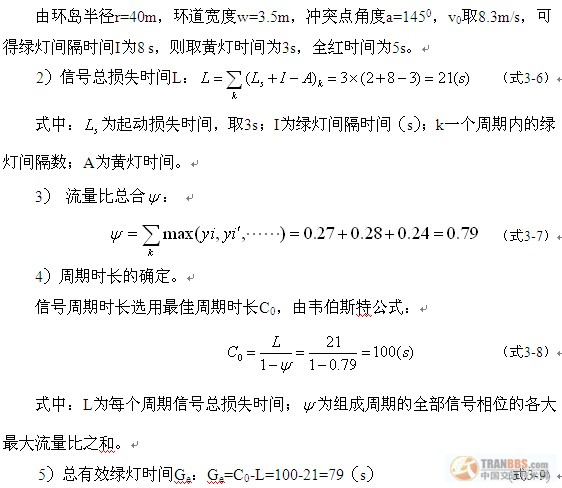
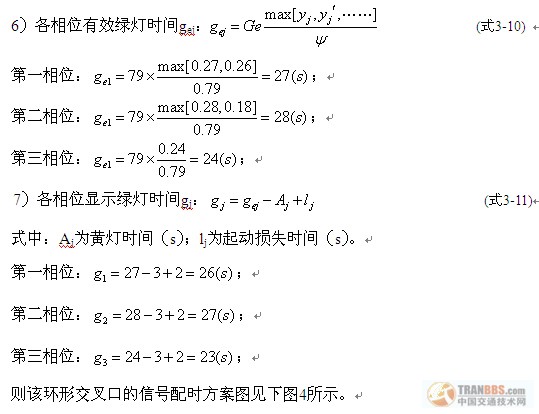
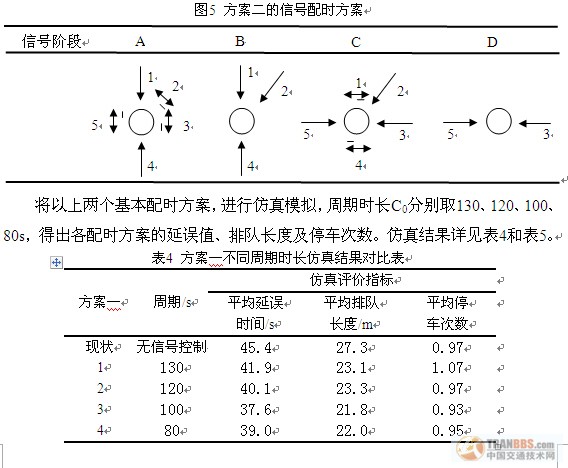
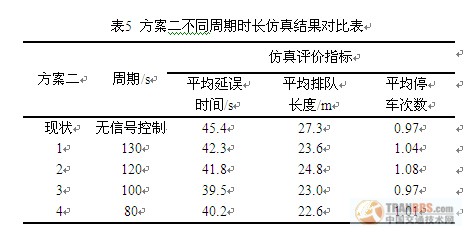
由以上比较表可知, 各优化方案均使“514”转盘的交通运行状况得到不同程度的改善,方案一的各项评价指标要优于方案二 ,这是因为方案一牺牲了部分行人过街时间,且对行人安全有潜在影响;方案二很好地解决了行人过街问题但导致车辆的平均延误、排队长度和停车次数不同程度的增加,在车辆较多的情况下甚至会导致新的拥堵。综上所述,方案一中的3较其它方案更好,可视为最佳方案。
4 结论
本文提出的应用信号配时和微观仿真相结合的方法,相比传统的配时方法,对于交叉口的优化效果更加显著。实践证明,将V ISS IM交通仿真软件应用于城市交通网络(特别是交叉口) 交通运行状况仿真分析及交通方案的优化与评定,为在复杂交通条件下确定交叉口乃至整个城市交通组织方案提供了一条切实可行的新思路新方法,该方法具有良好的操作性和实用性,避免了在拟定交通控制方案及对方案进行评价时因无从直观观测车辆在道路及交叉口的运行状况而引起的不足。
未经许可,任何人不得复制、转载、或以其他方式使用本网站的内容。如发现本站文章存在版权问题,烦请提供版权疑问、身份证明、版权证明等材料,与我们联系,我们将及时沟通与处理。